System Modeling: Flyball Governor#
Preparations#
from IPython.display import HTML
import numpy as np
import base64
import matplotlib.pyplot as plt
plt.rcParams.update({
"text.usetex": True,
"font.family": "Helvetica",
"font.size": 10,
})
from sympy import *
from mathprint import *
# https://stackoverflow.com/questions/49145059/how-to-change-printed-representation-of-functions-derivative-in-sympy
latexReplaceRules = {
# r'{\left(t \right)}':r' ',
r'\frac{d}{d t}':r'\dot',
r'\frac{d^{2}}{d t^{2}}':r'\ddot',
}
def latexNew(expr,**kwargs):
retStr = latex(expr,**kwargs)
for _,__ in latexReplaceRules.items():
retStr = retStr.replace(_,__)
return retStr
init_printing(use_unicode=False)
init_printing(latex_printer=latexNew)
def display_gif(fn):
b64 = base64.b64encode(open(fn,'rb').read()).decode('ascii');
display(HTML(f'<img src="data:image/gif;base64,{b64}" />'));
Declare the necessary symbols:
t = symbols('t', real=True)
theta1 = Function('theta1')
theta2 = Function('theta2')
tau = symbols('tau', real=True)
J, m, l, d, g, b1, b2 = symbols('J m l d g b1 b2', real=True, nonnegative=True)
Kinetic energy#
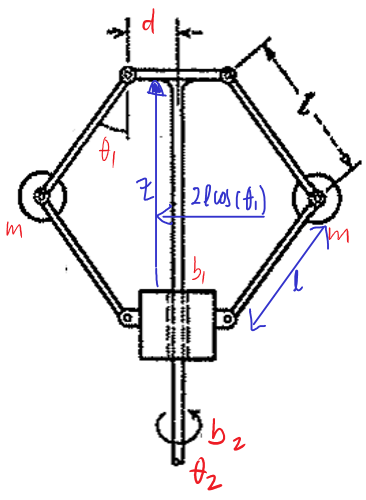
Let us describe the two motions that contribute to kinetic energy:
upward-downward rotations around \(\theta_1\) \(\rightarrow T_1\)
planar continous rotations around \(\theta_2\) \(\rightarrow T_2\)
Note that we use parallel axis theorem to compute the get the correct momen of inertia about the given rotation axis.
T1 = simplify( 2*1/2*(J+m*l**2)*diff(theta1(t) ,t)**2 )
T2 = simplify( 2*1/2*(J+m*(l*sin(theta1(t))+d)**2)*diff(theta2(t) ,t)**2 )
mprint('T_1=' + latexNew(T1))
mprint('T_2=' + latexNew(T2))
Potential energy#
V = 2*m*g*l*(1-cos(theta1(t)))
mprint('V=' + latexNew(V))
Dissipassion#
We introudce two damping elements that cause energy lost:
\(R_1\): dissipation by the linear bushing moving along the vertical rod.
\(R_2\): dissipation by the rotating vertical rod.
z = l-l*cos(theta1(t))
zdot = diff(z, t)
R1 = 1/2*b1*zdot**2
R2 = 1/2*b2*diff(theta2(t))**2
mprint('R_1=' + latexNew(R1))
mprint('R_2=' + latexNew(R2))
Euler–Lagrange equations#
Now, we shall derive the Euler-Lagrange euqations step by step.
T = T1 + T2 # Total kinetic energy
L = T - V # The Lagrangian
dL_dTh = Matrix([diff(L, theta1(t)), diff(L, theta2(t))])
mprint('\\frac{dL}{d\\theta}=' + latexNew(dL_dTh))
dL_dThdot = simplify(Matrix([diff(L, diff(theta1(t), t)), diff(L, diff(theta2(t), t))]))
mprint('\\frac{dL}{d\\dot{\\theta}}=' + latexNew(dL_dThdot) )
dR1_dThdot = simplify(Matrix([diff(R1, diff(theta1(t), t)), diff(R1, diff(theta2(t), t))]))
mprint('\\frac{dR_1}{d\\dot{\\theta}}=' + latexNew(dR1_dThdot) )
dR2_dThdot = simplify(Matrix([diff(R2, diff(theta1(t), t)), diff(R2, diff(theta2(t), t))]))
mprint('\\frac{dR_2}{d\\dot{\\theta}}=' + latexNew(dR2_dThdot) )
dL_dThdot_dt = simplify(Matrix([diff(diff(L, diff(theta1(t), t)),t) , diff(diff(L, diff(theta2(t), t)), t)]))
mprint('\\frac{dL}{d\\dot{\\theta} dt}=' + latexNew(dL_dThdot_dt) )
eq = simplify(dL_dThdot_dt - dL_dTh + dR1_dThdot + dR2_dThdot)
mprint('\\frac{dL}{d\\dot{\\theta} dt} - \\frac{dL}{d\\theta} + \\frac{dR_1}{d\\dot{\\theta}} + \\frac{dL}{d\\dot{\\theta} dt}=' + latexNew(eq) )
Equation of motions#
By rewriting the Euler-Lagrange equations, we can then express the system’s equation of motions.
eqs = Eq(eq, Matrix([0 , tau]))
odes = solve(eqs, [diff(theta1(t), t, t), diff(theta2(t), t, t)])
ode1 = simplify(odes[diff(theta1(t), t, t)])
mprintb(" \\ddot{\\theta_1}(t) = ", latexNew(ode1))
ode2 = simplify(odes[diff(theta2(t), t, t)])
mprintb(" \\ddot{\\theta_1}(t) = ", latexNew(ode2))
Numerical model#
For demostration purposes, we will set some arbitrary numerical values to the parameters such that we can simulate the system.
We also need to define how we are going to actuate the system. The ideal input to the system is the torque: \( \tau(t) \). However, we can make the demonstration simpler by ignoring the second equation (ode2). This is possible if we assume we can apply instantaneous rotation (\( \dot{\theta}_2 \)) to the base of the device. Hence, in thise case we are only interested with how \( \dot{\theta}_2 \) afffects \( \theta_1 \) and \( \dot{\theta}_1 \).
m_ = 0.1
J_ = 0.01
l_ = 0.2
g_ = 9.8
b1_ = 5
b2_ = 0.1
d_ = 0.02
RPM_ = 100*0.10472 #converting RPM to rad/s
ode1n = simplify(ode1.subs(([m, m_],
[b1, b1_],
[b2, b2_],
[J, J_],
[l, l_],
[d, d_],
[g, g_])))
mprintb(" \\ddot{\\theta_1}(t) = ", latexNew(ode1n))
ode2n = simplify(ode2.subs(([m, m_],
[b1, b1_],
[b2, b2_],
[J, J_],
[l, l_],
[d, d_],
[g, g_],
[tau, 0])))
mprintb(" \\ddot{\\theta_2}(t) = ", latexNew(ode2n))
Numerical solutions#
After plugging all parameters into the model, we can now solve the model numerically and obtain the motions as the results. To do this, we use the ODE solver that can be found in scipy.integrate. Also, we must put the model into its state-space form. The ODE solver takes the model only in a state-space form.
import scipy.integrate
import matplotlib.pyplot as plt
Complete state-space model#
Let us introduce some new variables to descrive the system’s states: \(y=[y_0, y_1, y_2, y_3]\), where:
\( y_0 = \theta_1 \)
\( y_1 = \dot{\theta}_1 \)
\( y_2 = \theta_2 \)
\( y_3 = \dot{\theta}_2 \)
Hence, we also have: \( \dot{y}=[\dot{y}_0, \dot{y}_1, \dot{y}_2, \dot{y}_3] \), where:
\( \dot{y}_0 = \dot{\theta_1} \)
\( \dot{y}_1 = \ddot{\theta}_1 \)
\( \dot{y}_2 = \dot{\theta_2} \)
\( \dot{y}_3 = \ddot{\theta}_2 \)
# y[0] --> theta1
# y[1] --> theta1d
# y[2] --> theta2
# y[3] --> theta2d
y = symbols( 'y:4' )
ode1n_ = simplify(ode1n.subs(([diff(theta1(t), t), y[1]],
[diff(theta2(t), t), y[3]],
[theta1(t), y[0]],
[theta2(t), y[2]])))
ode2n_ = simplify(ode2n.subs(([diff(theta1(t), t), y[1]],
[diff(theta2(t), t), y[3]],
[theta1(t), y[0]],
[theta2(t), y[2]])))
ydot = Matrix([y[1], ode1n_, y[3], ode2n_,])
mprintb("\\dot{y}=", latexNew(ydot))
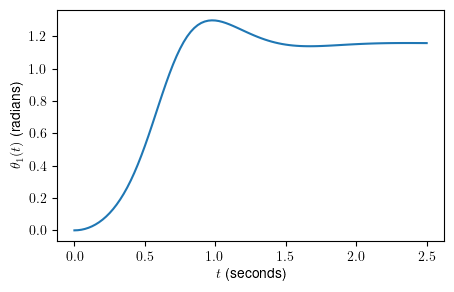
Partial state-space model#
This is the simpler model where we only take the first two rows.
ydots = [y[1], ode1n_.subs(y[3], RPM_)]
mprintb("\\dot{y}=", latexNew(Matrix(ydots)))
f = lambdify((t, y[0:2]), ydots)
y0 = [0., 0.]
tend = 2.5
t_eval = np.linspace(0, tend, 101)
sol = scipy.integrate.solve_ivp(f, (0, tend), y0, t_eval=t_eval)
%matplotlib inline
fig, ax = plt.subplots(figsize=(5,3))
ax.plot(sol.t, sol.y[0,:], markeredgewidth=2)
ax.set_xlabel(" $t$ (seconds) ")
ax.set_ylabel(" $\\theta_1 (t) $ (radians) ")
plt.show()
%matplotlib notebook
import matplotlib.pyplot as plt
import numpy as np
import matplotlib.animation as animation
# Collect the points
N = len(sol.t)
th1_array = sol.y[0,:]
th2_array = RPM_ * sol.t
# Plotting starts here
fig = plt.figure()
ax = fig.add_subplot(projection="3d")
# Create lines initially
E = np.array([0., 0., 0.])
F = np.array([0., 0., -2*l_])
rod = ax.plot([E[0], F[0]], [E[1], F[1]], [E[2], F[2]], '-r', linewidth=3.0 )[0]
arms = ax.plot([], [], [], '.-b')[0] # without data
# Setting the Axes properties
ax.set(xlim3d=(-0.2, 0.2), xlabel='X')
ax.set(ylim3d=(-0.2, 0.2), ylabel='Y')
ax.set(zlim3d=(-0.2, 0.2), zlabel='Z')
# --- Animation update callback function ---
def update_lines(num):
A1 = np.array([-d_*cos(th2_array[num]),-d_*sin(th2_array[num]),0], dtype=np.float32)
A2 = np.array([ d_*cos(th2_array[num]), d_*sin(th2_array[num]),0], dtype=np.float32)
B = np.array([-(l_*sin(th1_array[num])+d_)*cos(th2_array[num]), -(l_*sin(th1_array[num])+d_)*sin(th2_array[num]), -l_*cos(th1_array[num])])
C = np.array([(l_*sin(th1_array[num])+d_)*cos(th2_array[num]), (l_*sin(th1_array[num])+d_)*sin(th2_array[num]), -l_*cos(th1_array[num])])
D = np.array([ 0,0, -l_*cos(th1_array[num])*2])
arms.set_data_3d(np.vstack([D, B, A1, A2, C, D]).T)
return [arms]
# ---
ani = animation.FuncAnimation(fig, update_lines, N, interval=1000);
ani.save("./images/flyball.gif", writer='imagemagick', fps=15);
display_gif("./images/flyball.gif")
